|
|
|
|
|
|
| University of Southern California |
|
|
| [Paper] [Code] |
|
|
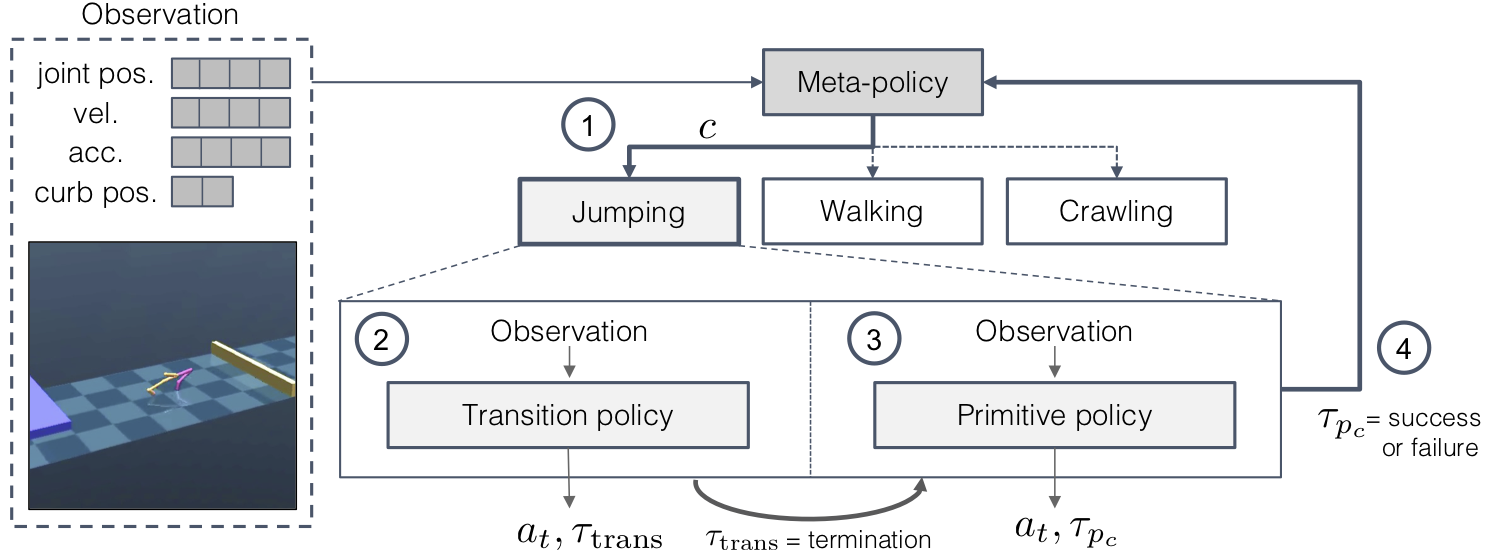
This tough environment requires the agent to walk, jump and crawl its way to success.
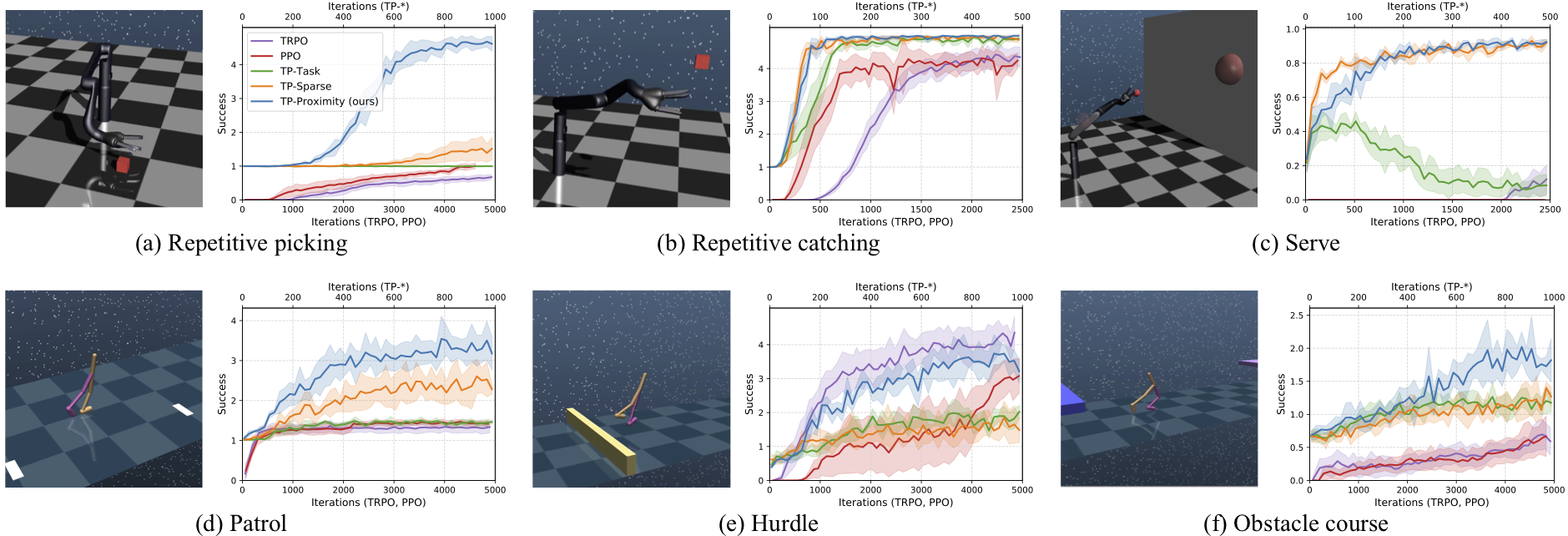
Inspired by tennis, this task is composed of tossing and hitting a ball to a target.
Similar to a guard patrol, the agent must walk forwards and backwards repeatedly.
|
| Website design: BAIR paper websites |